Introduction to Raspberry Pi Robots
Raspberry Pi has revolutionized the world of DIY projects and robotics. With its small size, low cost, and versatile functionality, the Raspberry Pi has become a popular choice for building robots. Whether you’re a beginner or an experienced maker, creating a Raspberry Pi robot is an exciting and rewarding project.
In this article, we’ll guide you through the process of building your own Raspberry Pi robot. We’ll cover everything from the necessary components and tools to the step-by-step assembly and programming. By the end of this article, you’ll have a fully functional Raspberry Pi robot ready to explore and perform various tasks.
What is a Raspberry Pi?
Before we dive into building a Raspberry Pi robot, let’s first understand what a Raspberry Pi is. Raspberry Pi is a credit card-sized single-board computer developed by the Raspberry Pi Foundation. It was designed to promote the teaching of basic computer science in schools and developing countries.
The Raspberry Pi runs on a Linux-based operating system and has various models available, each with different specifications. Some of the popular models include:
| Model | Processor | RAM | USB Ports | Ethernet | Wireless | Bluetooth |
|---|---|---|---|---|---|---|
| Raspberry Pi 4 | Broadcom BCM2711 | 2GB, 4GB, 8GB | 2 x USB 3.0, 2 x USB 2.0 | Gigabit Ethernet | 802.11ac Wi-Fi | Bluetooth 5.0 |
| Raspberry Pi 3 Model B+ | Broadcom BCM2837B0 | 1GB | 4 x USB 2.0 | Gigabit Ethernet | 802.11ac Wi-Fi | Bluetooth 4.2 |
| Raspberry Pi Zero W | Broadcom BCM2835 | 512MB | 1 x USB 2.0 | N/A | 802.11n Wi-Fi | Bluetooth 4.1 |
The Raspberry Pi provides a powerful and flexible platform for building robots, thanks to its GPIO (General Purpose Input/Output) pins, which allow you to connect various sensors, motors, and other components.

Components Required for Building a Raspberry Pi Robot
To build a Raspberry Pi robot, you’ll need the following components:
- Raspberry Pi board (Raspberry Pi 4 or Raspberry Pi 3 Model B+ recommended)
- SD card (at least 8GB)
- Power supply (5V, 2.5A or higher)
- Chassis or robot kit
- DC motors
- Motor driver (e.g., L298N)
- Wheels
- Breadboard
- Jumper wires
- Ultrasonic sensor (e.g., HC-SR04)
- Battery pack (e.g., 2x 18650 batteries)
- Switch
You’ll also need the following tools:
- Screwdriver
- Soldering iron (optional)
- Wire cutters
- Pliers
Step-by-Step Guide to Building a Raspberry Pi Robot
Step 1: Assemble the Chassis
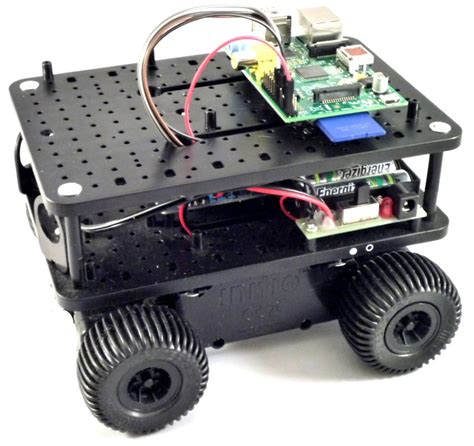
The first step in building your Raspberry Pi robot is to assemble the chassis or robot kit. This provides the framework for mounting the Raspberry Pi, motors, and other components. Follow the instructions provided with your specific chassis or robot kit to assemble it correctly.
Step 2: Connect the Motors and Wheels
Next, you’ll need to connect the DC motors to the chassis and attach the wheels. Make sure the motors are securely mounted and the wheels are properly aligned. If your chassis doesn’t have pre-drilled holes for mounting the motors, you may need to drill them yourself.
Step 3: Connect the Motor Driver
The motor driver is responsible for controlling the speed and direction of the DC motors. Connect the motor driver to the Raspberry Pi’s GPIO pins and the motors according to the manufacturer’s instructions. The L298N motor driver is a popular choice for Raspberry Pi robots.
Here’s a typical wiring diagram for connecting the L298N motor driver to the Raspberry Pi:
| Raspberry Pi GPIO | L298N Motor Driver |
|---|---|
| GPIO 18 | IN1 |
| GPIO 23 | IN2 |
| GPIO 24 | IN3 |
| GPIO 25 | IN4 |
| 5V | VCC |
| GND | GND |
Step 4: Connect the Ultrasonic Sensor
The ultrasonic sensor allows your Raspberry Pi robot to detect obstacles and measure distances. Connect the ultrasonic sensor to the Raspberry Pi’s GPIO pins according to the following wiring diagram:
| Raspberry Pi GPIO | HC-SR04 Ultrasonic Sensor |
|---|---|
| 5V | VCC |
| GND | GND |
| GPIO 17 | Trigger |
| GPIO 27 | Echo |
Step 5: Power the Raspberry Pi
To power your Raspberry Pi robot, you can use a battery pack or a power bank. Connect the power supply to the Raspberry Pi’s micro USB port. Make sure the power supply provides sufficient current (2.5A or higher) to power both the Raspberry Pi and the motors.
Step 6: Install the Operating System
Install the Raspberry Pi operating system (Raspbian) on the SD card. You can download the latest version of Raspbian from the official Raspberry Pi website and use a tool like Etcher to write the image to the SD card.
Step 7: Configure the Raspberry Pi
Insert the SD card into the Raspberry Pi and connect it to a monitor, keyboard, and mouse. Follow the initial setup wizard to configure the basic settings, such as the language, time zone, and Wi-Fi connection.
Step 8: Install Required Libraries
To control the motors and read data from the ultrasonic sensor, you’ll need to install some libraries. Open a terminal on the Raspberry Pi and run the following commands:
sudo apt-get update
sudo apt-get install python3-dev python3-rpi.gpio
These commands will update the package list and install the necessary libraries for GPIO control.
Step 9: Write the Python Code
Create a new Python file and write the code to control your Raspberry Pi robot. Here’s a basic example of how to control the motors and read data from the ultrasonic sensor:
import RPi.GPIO as GPIO
import time
# Motor pins
motor_right_forward = 18
motor_right_backward = 23
motor_left_forward = 24
motor_left_backward = 25
# Ultrasonic sensor pins
trigger_pin = 17
echo_pin = 27
# Set up GPIO pins
GPIO.setmode(GPIO.BCM)
GPIO.setup(motor_right_forward, GPIO.OUT)
GPIO.setup(motor_right_backward, GPIO.OUT)
GPIO.setup(motor_left_forward, GPIO.OUT)
GPIO.setup(motor_left_backward, GPIO.OUT)
GPIO.setup(trigger_pin, GPIO.OUT)
GPIO.setup(echo_pin, GPIO.IN)
# Function to measure distance
def measure_distance():
GPIO.output(trigger_pin, True)
time.sleep(0.00001)
GPIO.output(trigger_pin, False)
start_time = time.time()
stop_time = time.time()
while GPIO.input(echo_pin) == 0:
start_time = time.time()
while GPIO.input(echo_pin) == 1:
stop_time = time.time()
time_elapsed = stop_time - start_time
distance = (time_elapsed * 34300) / 2
return distance
# Function to control motors
def control_motors(right_forward, right_backward, left_forward, left_backward):
GPIO.output(motor_right_forward, right_forward)
GPIO.output(motor_right_backward, right_backward)
GPIO.output(motor_left_forward, left_forward)
GPIO.output(motor_left_backward, left_backward)
# Main loop
try:
while True:
distance = measure_distance()
print("Distance: %.2f cm" % distance)
if distance > 20:
control_motors(True, False, True, False) # Move forward
else:
control_motors(False, False, False, False) # Stop
time.sleep(0.1)
except KeyboardInterrupt:
GPIO.cleanup()
This code uses the RPi.GPIO library to control the GPIO pins connected to the motors and ultrasonic sensor. The measure_distance() function calculates the distance using the ultrasonic sensor, and the control_motors() function controls the direction of the motors based on the measured distance.
Step 10: Run the Code
Save the Python code file and run it using the following command in the terminal:
python3 your_code_file.py
Your Raspberry Pi robot should now start moving and avoiding obstacles based on the ultrasonic sensor readings.

Expanding Your Raspberry Pi Robot
Once you have a basic Raspberry Pi robot up and running, there are numerous ways to expand and enhance its capabilities. Here are a few ideas:
- Add a camera: Attach a Raspberry Pi camera module to enable computer vision and object detection.
- Implement remote control: Use a wireless gamepad or create a web-based control interface to remotely control your robot.
- Add more sensors: Incorporate additional sensors, such as infrared sensors, light sensors, or a gyroscope, to provide more data for navigation and decision-making.
- Explore machine learning: Use machine learning libraries like TensorFlow or OpenCV to teach your robot to recognize objects, follow lines, or navigate autonomously.
- Create a custom body: Design and 3D print a custom body or shell for your robot to give it a unique appearance.
The possibilities are endless, and the Raspberry Pi provides a versatile platform for experimentation and creativity in robotics.
Frequently Asked Questions (FAQ)
-
Can I use a different motor driver instead of the L298N?
Yes, you can use other motor drivers compatible with the Raspberry Pi, such as the TB6612FNG or the DRV8833. Just make sure to adjust the wiring and code accordingly. -
What programming languages can I use to control the Raspberry Pi robot?
Python is the most popular language for programming Raspberry Pi robots, but you can also use other languages like C++, Java, or Node.js, depending on your preferences and the libraries available. -
How long does the battery last on a Raspberry Pi robot?
The battery life depends on factors like the capacity of the battery pack, the current draw of the motors, and the efficiency of the power management. With a typical 2x 18650 battery pack, you can expect the robot to run for several hours, depending on usage. -
Can I add more than one ultrasonic sensor to the robot?
Yes, you can add multiple ultrasonic sensors to provide a wider field of view and improve obstacle detection. You’ll need to modify the code to handle multiple sensors and decide how to integrate their readings. -
How can I make my Raspberry Pi robot navigate autonomously?
To enable autonomous navigation, you’ll need to implement algorithms like simultaneous localization and mapping (SLAM) or use techniques like line following or wall following. This involves combining data from sensors, creating a map of the environment, and planning paths based on the robot’s goals.
Conclusion
Building a Raspberry Pi robot is an exciting and educational project that allows you to explore the world of robotics and programming. With the step-by-step guide provided in this article, you now have the knowledge and tools to create your own Raspberry Pi robot.
Remember, building a robot is an iterative process. Don’t be afraid to experiment, make mistakes, and learn from them. The Raspberry Pi community is vast and supportive, so you’ll find plenty of resources, tutorials, and forums to help you along the way.
As you continue to develop your Raspberry Pi robot, consider exploring advanced topics like computer vision, machine learning, and autonomous navigation. The skills and knowledge you gain from this project can open up a world of possibilities in the field of robotics.
So, grab your Raspberry Pi, gather the necessary components, and start building your very own Raspberry Pi robot today!
No responses yet